







Goal
To use computer vision and point clouds to identify objects and tables in a scene. In particular, we focus on the amount of objects and theirs positions relative to the camera.
Descripción
Objects on a plane are identified using point cloud, this objects are unknown to the system. In parcular, we are interested in the amount of objects, their distance, position and angle relative to the camera. Additionaly, we focus on the plane characteristicts asuming this corresponds to a table. These characteristics are using to plan leave or take objects on the table. The aimed scenarios are similar to those of table with objects where the robot Golem-II+ could interact with the objects.
These are some examples of the point cloud objects

Table point of view

Point Cloud
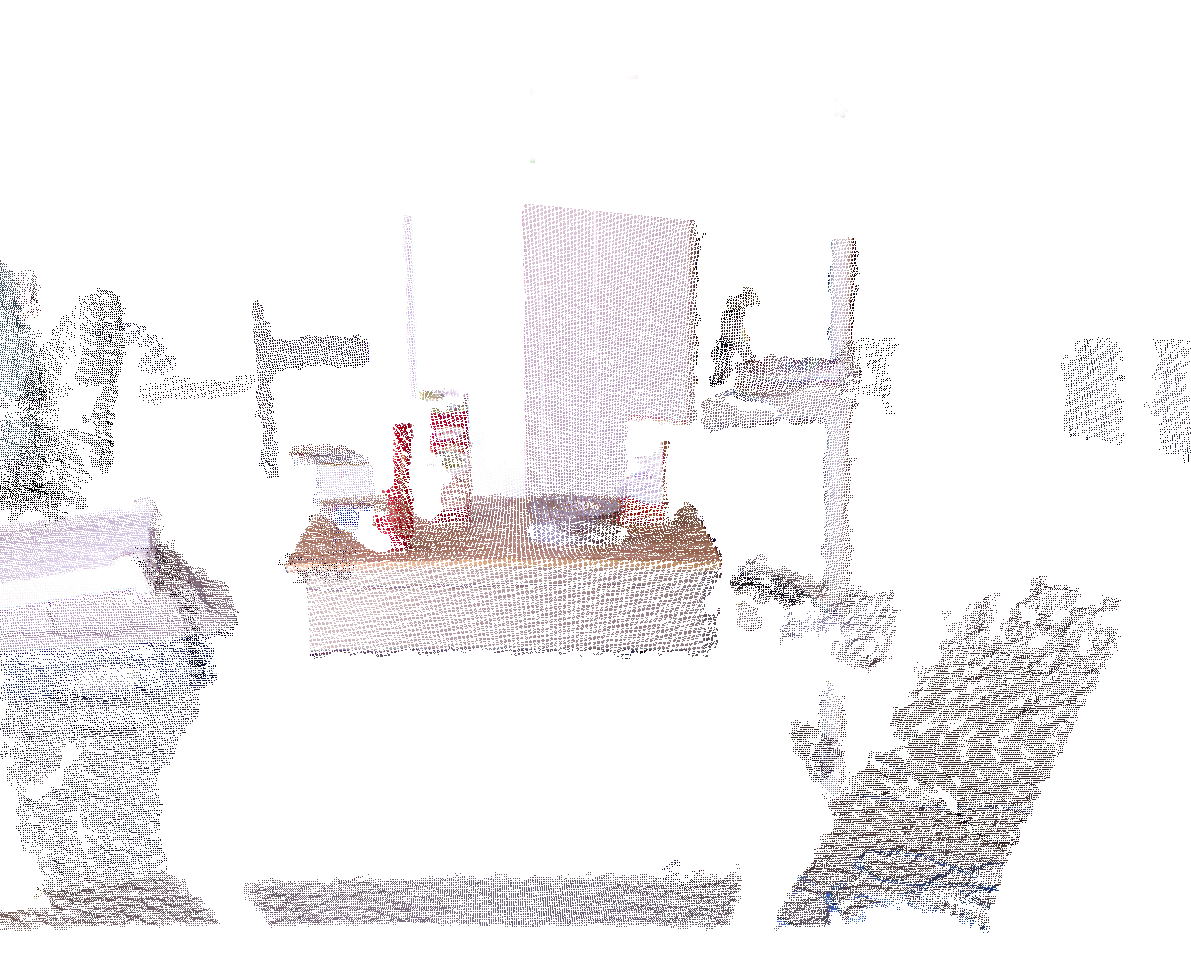
Table and objects
Participants
- Catalina Vázquez
- Luis García
- Dr. Gibran Fuentes