







Objetivo
Diseñar un sistema de visión computacional para identificar objetos y mesas que podrían contenerlos en una escena e identificar la cantidad de objetos, su distancia, posición y pendiente mediante imágenes de nubes de puntos.
Descripción
Mediante imágenes de nubes de puntos se deben identificar que hay objetos sobre una superficie plana, no conocidos por el robot así como la cantidad y distancia a la que se encuentran y a su vez identificar mesas, su distancia y pendiente con respecto a la ubicación del robot para que sea posible dejar objetos sobre su superficie. La identificación de los objetos y planos debe llevarse a cabo aun en escenarios que presentan similitudes con las características que tiene una mesa y objetos pero que en realidad no lo son, así como tomar solo las mesas y objetos que estén en un área cercana al robot y no todo el escenario.
Estos son algunos ejemplos de mesas y objetos identificados

Vista de mesa

Nube de puntos
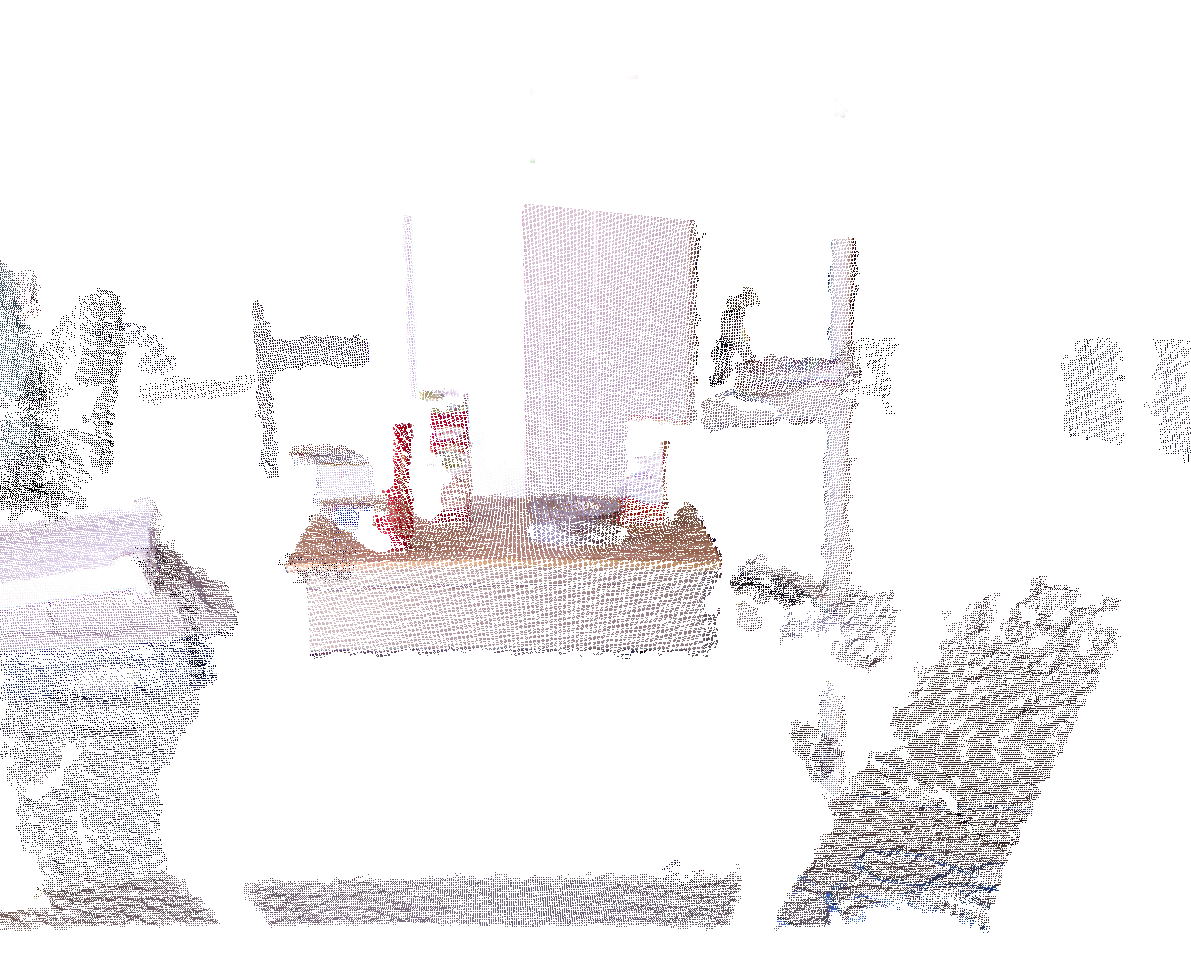
Mesa y objetos
Participantes
- Catalina Vázquez
- Luis García
- Dr. Gibran Fuentes