







If you wish you can join the Golem Group, the requirements are:
- being enrolled in an academic program
- have a good academic record
- being willing to work in a team
- and being proactive
The current vacants are listed below, if you have any question you can contact us.
Audio Signal Processing [?]
- Discrimination between Human and Environmental Sound Source
- Intelligent Environmental Acoustic Activity Detection
- Intelligent Acoustic Characterization of the Environment, and its Filter
- Real-Time Directional Source Separation in a Service Robot
- Evaluation of Audio Filters for the Benefit of Voice Recognition
- User Identification by Auditive Means
Diagramatic reasoning [?]
Speech technology [?]
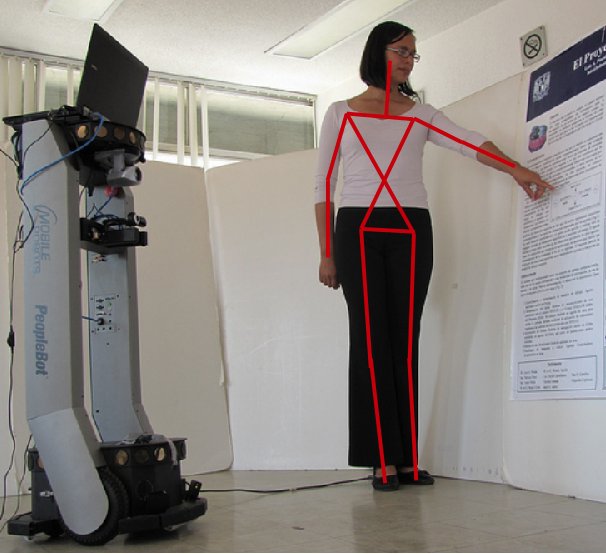
Gestures Recognition for Human-Robot Interaction
Places: Master (1), Undergraduate (1)
Description:
Gestures are a prominent part of human communication. For service robots the ability to recognize and interpret human gestures can lead to a more natural and effective interaction. The aim of this project is to recognize and interpret simple human gestures such as pointing, stopping and calling for human-robot interaction.For majors in: Computer Science and related
Extra requierements:
- Programming Skills
- Experience in Computer Vision
Contact: Dr. Luis Pineda and Dr. Gibran Fuentes
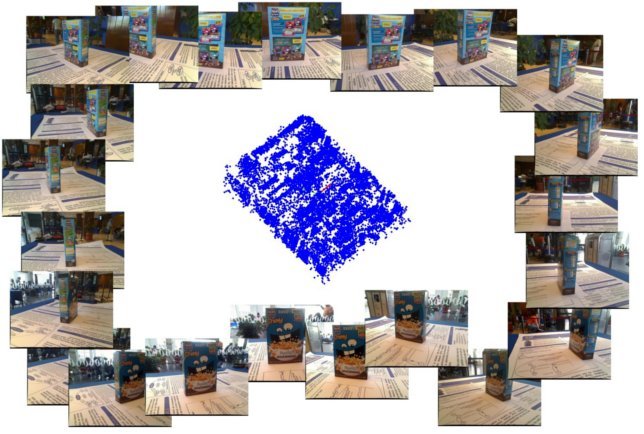
Automatic Object Modeling using multiple Views
Places: Master (1), Undergraduate (1)
Description: In order for robots to be able to recognize objects, it is necessary to construct models of them. Usually, the construction of such models requires some kind of human supervision which could be very time consuming. In this project, we aim to construct object models automatically from multiple views.
For majors in: Computer Science and related
Extra requirements:
- Programming Skills
- Experience with Computer Vision
Contact: Dr. Luis Pineda and Dr. Gibran Fuentes
General Framework for Multiple Methods of Object Recognition

Places: Undergraduate (1)
Description: There exist a great variety of object types with very different appereances and shapes. Unfortunately, there is no single method that can recognize all object types. In general, object recognition methods perform well only on objects with a certain visual property, e. g., homogeneous, transparent or textured. Hence, to improve the recognition performance, it is necessary to combine different strategies. This project aims to develop a general framework to integrate different methods in a flexible fashion.
For majors in: Computer Science and related
Extra requierements:
- Programming Skills
- Experience with Computer Vision
Contact: Dr. Luis Pineda and Dr. Gibran Fuentes
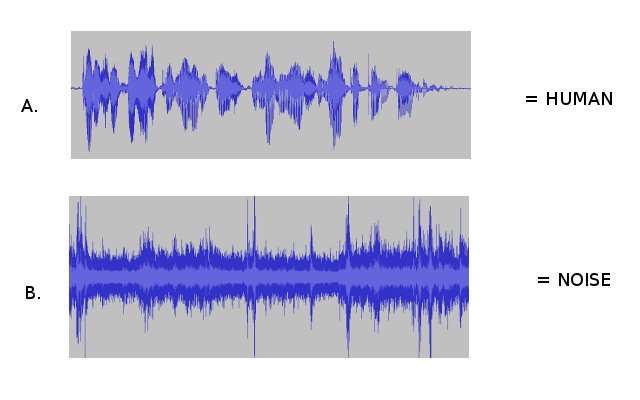
Discrimination between Human and Environmental Sound Sources
Places: Undergraduate (1), PhD (1)
Description: An important ability that is required in a service robot is to distinguish if a sound is human generated or something else that can be ignored. To this effect, the voice recognizer can trust that it is processing only human voice. This project aims to approach this problem by, first, discriminate between known users and environmental noise, given a recorded signal; and, second, discrimiante, in real time, between humans (known and unknown) talking with each other and enivormental noise.
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
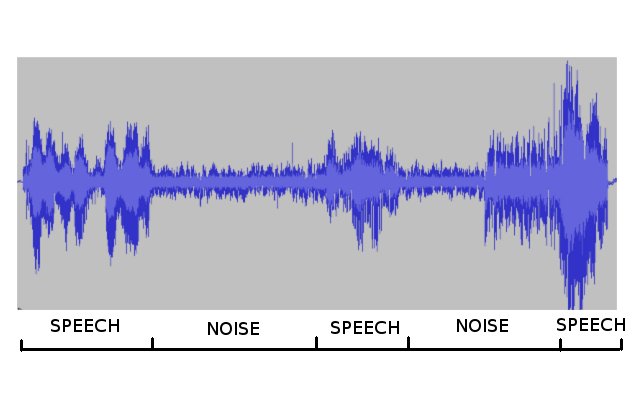
Intelligent Environmental Acoustic Activity Detection
Places: Undergraduate (1), Master (1)
Description: An important step in the processing sequence of acoustic signals is the detection of at what times should the input signal should be processed. In this way, the subsequent step only need to process at the relevant moments of the signal. Because the service robot is mobile, and it can change from environment drastically, such detection should be to automatically adjust to the environmental noise.
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
Intelligent Acoustic Characterization of the Environment, and its Filter
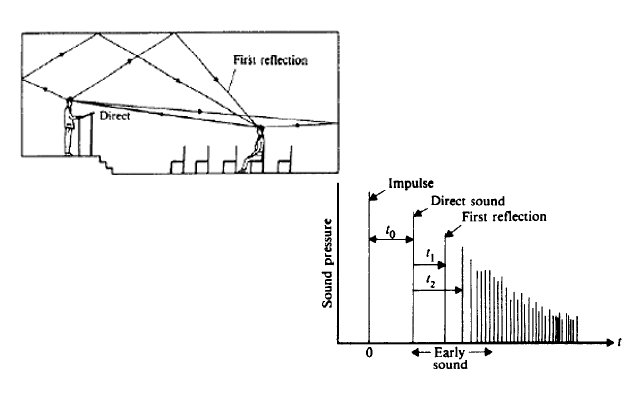
Places: Master (1), PhD (1)
Description: A big part of the acoustic contents of sound signals are nocive for the next steps of the audio processing: reverberation, non-stationary noises, etc. The aim of this project is to obtain the acoustic characteristic of the environment to build an acoustic scene, to then remove the effects that are nocive to the processing (for example, reverberation) and/or obtain information from the environment that is relevant to other robotic modules (for example, room size).
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
Real-Time Directional Source Separation in a Service Robot
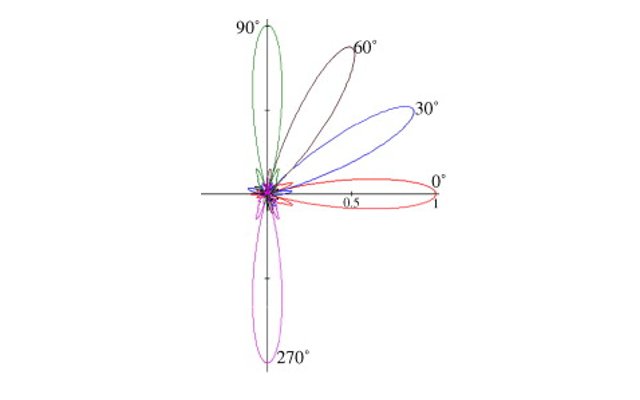
Places: Master (1), PhD (1)
Description: An important ability required in a service robot is to extract audio data from relevant sources from an environmental recording, with a light-weight hardware setup. To this effect, the project aims to directionalize, as a radar, the robot's auditive attention towards an area of the environment with omnidirectional sampling.
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
Evaluation of Audio Filters for the Benefit of Voice Recognition
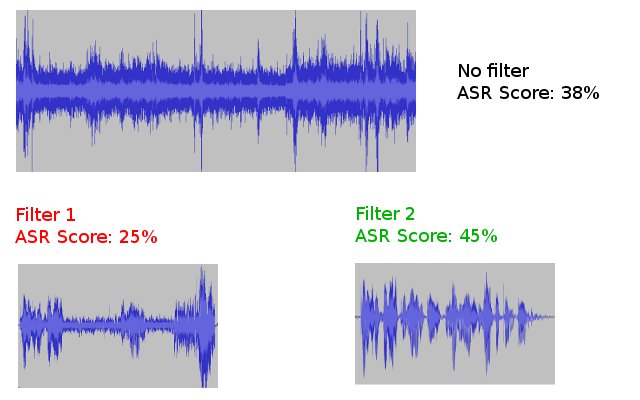
Places: Master (1), PhD (1)
Description: There is much literature that covers different strategies to filter noise from audio signals, but is rare to see their evaluation carried out from the perspective of voice recognition. It is possible that such filters actually degrade the quality of the human voice in the signal and, if such is the case, it is of interest to find which filters, and their respective calibration, provide the most benefit to voice recognition. In addition, it is also of interest to develop filters with this objective.
Análisis del habla infantil
Lugares: Licenciatura (2)
Descripcion: El Grupo Golem cuenta con una colección extensiva del habla de niños interactuando con el sistema adivina la carta localizado en el museo Universum. Hemos trabajado en la caracterización de dicho corpus desdel el punto de vista del reconocimeinto de voz. En este proyecto se enfocaría a caracterizar el corpus desdel el punto de vista de los fenómenos fonéticos propios del habla infantil.
Dirigido a:Carreras en lingüística
Requisitos extras:
- Haber tomado curso de fonética
Contacto: Dr. Luis Pineda y Dr. Ivan Meza
Recolección de corpus en ambiente ruidoso
Lugares: Licenciatura (2)
Descripcion: El Grupo Golem realiza investigación para mejorar el desempeño de las tecnologías del habla para su uso en robots de servicio. Uno de los problemas más sobresalientes es el reconocimiento de voz en lugares con mucho ruido. Por lo siguiente el grupo busca recolectar un corpus del español de méxico ambientes ruidosos que permitan realizar investigación en este campo.
Dirigido a:Carreras en lingüística
Requisitos extras:
- Curso de fonética (opcional)
Contacto:Dr. Ivan Meza
Identificación de hablante
Lugares: Licenciatura (1), Maestría (2)
Descripcion: La identificación de un usuario a través del uso de la voz tiene multiple aplicaciones en las tecnologías del habla. En particular, estamos interesados en aplicar nuestros avances al robot Golem de tal forma que en el futuro Golem pueda reconocer a sus usuarios a través del habla.
Dirigido a:Carreras en computación y lingüística
Requisitos extras:
- Conceptos de programación o deseo de incursionar
- Curso de fonética (opcional)
Contacto:Dr. Ivan Meza
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
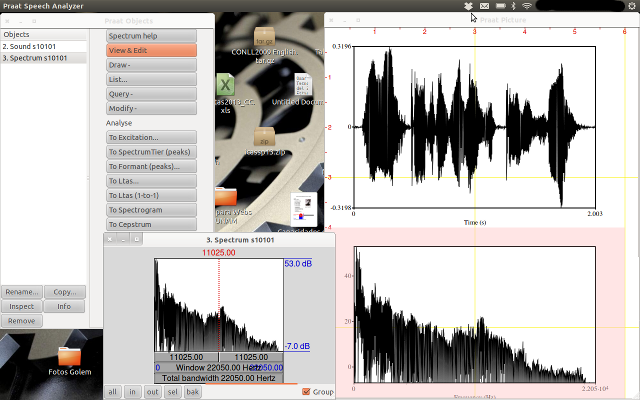
User Identification by Auditive Means
Places: Undergraduate (1), Master (1), PhD (1)
Description: In addition to localizing the user in the environment by audio, it is also of interest to identify such user as a type of redundancy for user identification modules in the robot. This project aims to create a user recognition system, assuming that the acoustic characteristics of the user are konwn a priori; then, an online training system will be developed that will be triggered automatically in cases where the user is not known; and, finally, algorithms will be develeopd to obtain user acoustic characteristics without relying in pre-specified phrases.
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
Odometry Error Model in Mobile Robotic Platform
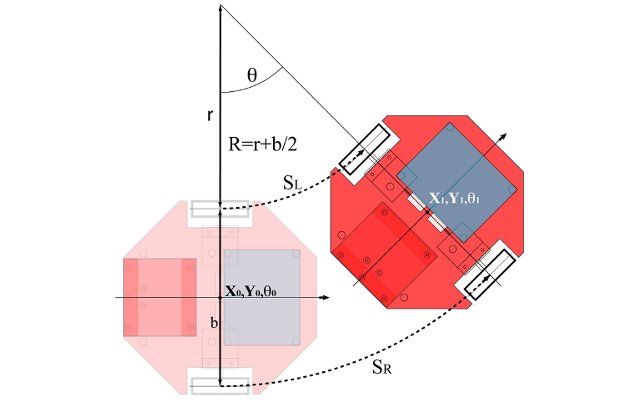
Places: Undergraduate (1), Master (1)
Description: Obtain the additive error model of the odometry in a mobile robotic platfrom with two wheels, using statistical tools. Afterwards, employ such model in the navigational system of the robot. Also, develop a modelling system of the error that can be deployed in other types of robotic platforms.
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
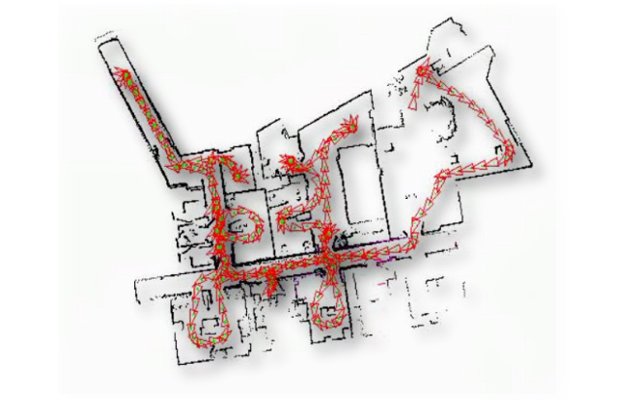
Creation of and Auto-Localization with Maps of Multimodal Information
Places: PhD (1)
Description: Currently, laser is the type of information mostly used in the automatic creation of maps, employed in robotic navigation. With the introduction of RGBd cameras, there are great opportunities to provide more information when creating such maps, obtaining redundancy and a better base for extrapolation
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
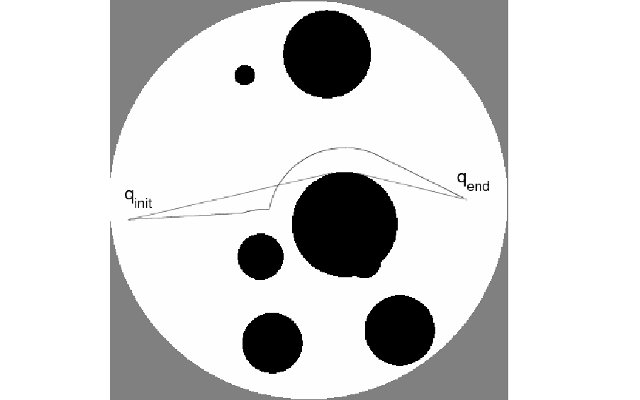
Contextual Obstacle Evasion
Places: Undergraduate (1), Master (1), PhD (1)
Description: An essential part of robotic navigation is obstacle evasion, which usually is carried out in a reactive manner: certain steps are applied, regardless of what has happened moments before, expecting that evasion emerges. It is of interest that the robot has strategies to evade already-known obstacles (doors, objects in the floor, etc.) and, therefore, make the evasion more efficient. In addition, given the object to be evaded, it is useful that the robot reflect such an object in the environment map y update the upcoming navigation
For majors in: Computing or similar
Extra requirements:
- Programming skills
- Knowledge in Artificial Ingelligence and Signal Processing
- Sound system experience (optional)
Contact:Dr. Caleb Rascón
Language Generation for the Golem Robot

Places: Licenciatura (1)
Description: The Golem Robot uses a template strategy in which predefined messages are used anytime it has to speak to the user. In this proyect, alternative strategies will be used to make Golem responses more diverse and independent of the task.
For majors in:computing and linguistics
Extra requirements:
- Optional basic programming skills
Contact: Dr. Luis Pineda and Dr. Ivan Meza
Child Speech

Lugares: Bachelor (2)
Descripcion: The Golem Group has a extensive collection of child speech interacting with the Guess the Card System at the museo Univerum. We have experience with this corpora from Automatic Speech Recognition point of view. In this work we will focus on the phonetic phenomena of the childr speech.
For majors in:linguistics
Extra requirements:
- Phonetics experience
Contact: Dr. Luis Pineda y Dr. Ivan Meza
Gesture labeling for children interactions

Places: Undergraduate (2)
Description: The identification of user emotions in an interactive system is essential. This proyect aims to build a resource coposed by videos and audio of childern interactic with a dialogue system were the emotions of the children are labelled.
For majors in:computing, linguistic and psychology
Extra requirements:
- Basic computing skills
Contact: Dr. Luis Pineda and Dr. Ivan Meza
Children speech analysis
Lugares: Undergraduate (2)
Descripcion: The Golem group has an extensive collection of recordings of children playing with the Guess the Card system located in the Universum Science Museum. These resources have been extensevily used in speech recognition. In this project we will work in to focus on the phonectic aspects of children speech.
Oriented to:linguists
Extra requirements:
- Phonetics class
Contacto: Dr. Luis Pineda y Dr. Ivan Meza
Collection of corpus in a noisy environment
Places: Undergraduate (2)
Descripcion: The Golem Group looks to improve the development of speech technology in service robots. One of the main probles is the speech recognition in places with noise. In order to increase the amount of corpora of the group, it looks into collect a Mexican spoken spanish corpora in noisy enviroments which will allow to perfrom research in this field.
Oriented to:linguistics
Extra requirements:
- Phonetics class
Contacto:Dr. Ivan Meza
Speaker identification
Lugares: Undegraduate (1), Master (2)
Descripcion: Speaker identification has multiple applications in speech technology. In particular, we are interested on apply our advanves in the field to the Golem robot so that in the future it can recognize the users through their voice.
Oriented to:computing and linguistics
Extra requirements
- Programming skill or willing to
- Phonetics class (optional)
Contacto:Dr. Ivan Meza
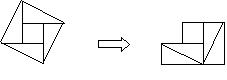
Diagramatic reasoning in the Golem Robot
Places: Licenciatura (1), Maestría (1), Doctorado (1)
Descripcion: The interpretation of diagrams is part of daily life with allows us to interact with the world and solve problems in a efficent way, for instance, follow the instructión in a ensamble manual, order object in a table, find alternative paths to our destination, and describe scenes. In this proyect, we look t give the robot Golem with diagramatic reasoning capabilities for the task of navigation, object manipulation, and language generation.
Aditional resources
- Descubrimiento y Prueba de Teoremas Diagramáticos: El Caso del Teorema de Pitagoras (2005)
- Abstraction, Visualization and Graphical Proof (2001)
Oriented to:Computing
Extra requirements:
- Basic programming skill
Contacto: Dr. Luis Pineda y Dr. Ivan Meza