







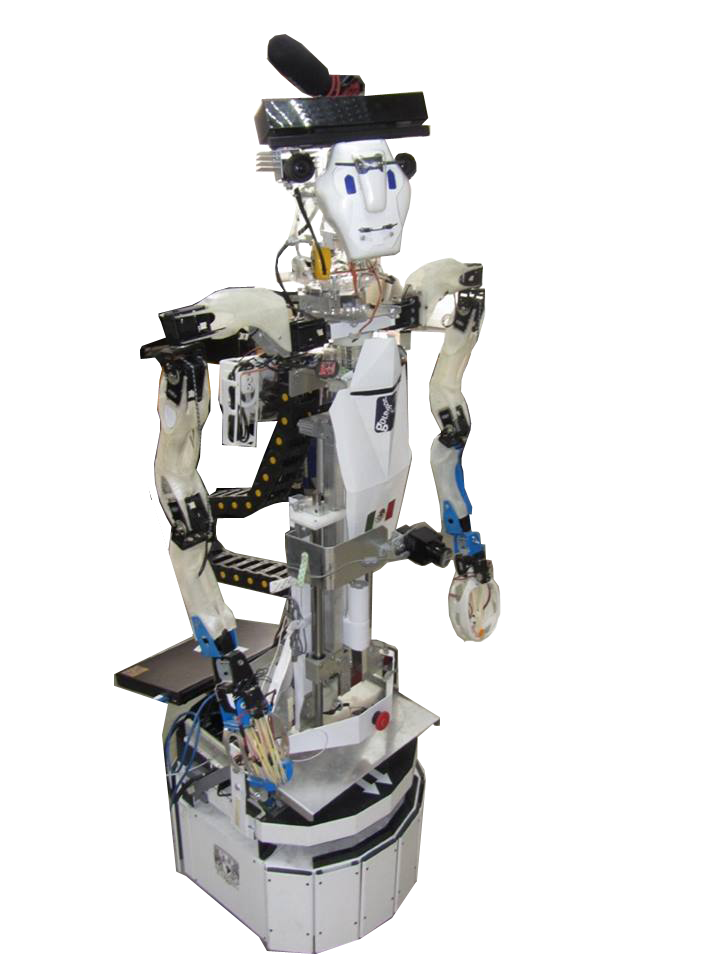
Golem-III
The design of our robot is based on a conceptual framework that is centered on the notion of dialogue models with the interaction-orinted cognitive architecture (IOCA) and its associated programming environment, SitLog. This framework provides flexibility and abstraction for task description and implementation, as well as a high level modularity. The tasks of the Robocup@home competition are implemented under this framework using a library of basic behaviors. In addition, over this framework, a system that carries out diagnostics, decision making and planning has been developed as an inference machine platform with which error detection and recovery is possible.
You can watch some videos here and some pictures here.
Golem-III is in a house built robot with the following hardware:
- 8-sensor sonar array
- PatrolBot
- Two 5-bumper protective arrays
- Infinity 3.5-Inch two-way loudspeakers
- Two protective bumper arrays with five bumper sensors each
- On-board computer Cobra EBX-12
- Sick LMS-500 Laser
Additionally, we have added the following hardware as well:
- Two Dell Precision M7510 laptop computers
- Hokuyo SOKUIKI laser range finder
- Black Box 5-port usb-powered ethernet switch
- Microsoft Kinect 2 camera
- Point Grey Flea USB 3 high-resolution camera
- 8SoundsUSB audio interface
- 3 miniature microphones
- RODE VideoMic directional microphone
- In-house robotic torso, arms and neck