







El Grupo Golem continuamente busca alumnos interesados en unirse al grupo en las siguientes modalidades:
- Realización de tesis en cualquier nivel
- Servicio social
- Estancia estudiantil
Los alumnos interesados deberán:
- estar registrados en algún programa académico
- tener un buen rendimiento académico
- tener disposición al trabajo en grupo
- y ser proactivos
Las vacantes actualmente disponibles en el grupo se listan abajo, si tienes cualquier pregunta no dudes en contactarnos.
Programación de Golem
- Protocolo de recuperación y conductas robustas para un robot de proposito general
- Planeación y toma de decisiones en tiempo real en el robot Golem
- Construcción de un agente de prolog en ROS
- Aprendizaje implícito en Golem
Procesamiento de señales de audio [?]
- Discriminación entre Fuentes Acústicas Humanas y Entorno
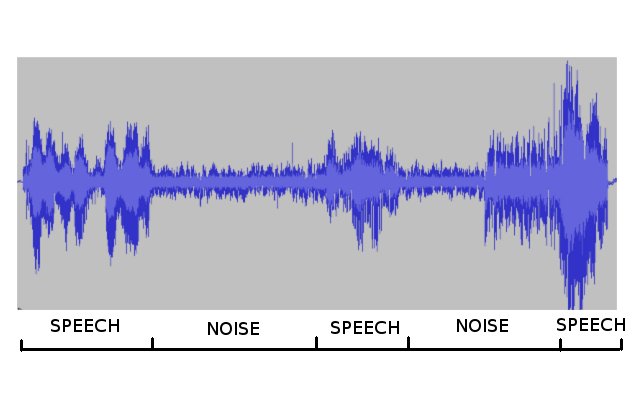
- Detección Inteligente de Actividad Sónica en el Entorno
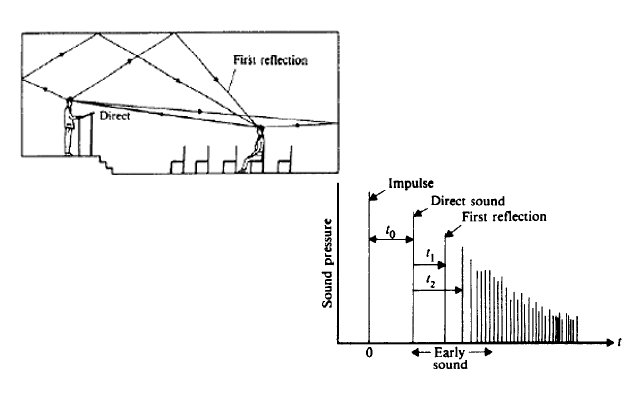
- Caracterización Acústica Inteligente del Entorno y su Filtro
Razonamiento diagramático [?]
Tecnologías del habla [?]
- Análisis del habla infantil
- Recolección de corpus en ambiente ruidoso
- Identificación de hablante
- Chatbot con personalidad
Protocolos de recuparación y conductas robustas para un robot de propósito general
Lugares disponibles: Maestría (1), Licenciatura (1)
Descripción: En la actualidad es posible programar al robot para realizar tareas diversas: buscar objetos, atender un restauran o ejecutar comandos. Estas tareas dependen de que no ocurran problema más allá de los que especificó el desarrollador. Sin embargo, hay muchas situaciones que no puede contemplar éste. Por lo que este proyecto busca definir mecanismos generales que le permitan al robot recuperarse de situaciones de error,ya sea para replantear sus objetivos o para buscar alternativas de resolver las tareas.
Dirigido a: Carreras en computación y áreas relacionadas
Requisitos extras:
- Excelentes habilidades en programación
Contacto: Dr. Luis Pineda
Planeación y toma de decisiones en tiempo real en el robot Golem
Lugares disponibles: Maestría (1), Licenciatura (1)
Descripción: Muchas de las actividades potenciales a realizar por un robot necesitan de mecanismos de planeación y toma de decisiones. En la actualidad existen un sin número de técnicas computacionales que nos permiten explorar planes o decisiones, en este proyecto buscamos adaptar algunas de estas al robot, en donde adicionalmente tiene que funcionar en tiempo real.
Dirigido a: Carreras en computación y áreas relacionadas
Requisitos extras:
- Excelentes habilidades en programación
Contacto: Dr. Luis Pineda
Construcción de un agente de prolog en ROS
Lugares disponibles: Maestría (1), Licenciatura (1)
Descripción: Robot Operating System es un sistema operativo para robots popular entre desarrolladores de robótica. En este proyecto buscamos adaptar el núcleo de desarrollos del grupo Golem (basados en Prolog) al sistema ROS, de tal forma de poner estos desarrollos al servicio de la comunidad ROS y que nuestros sistemas interactuen con sistemas ROS.
Dirigido a: Carreras en computación y áreas relacionadas
Requisitos extras:
- Excelentes habilidades en programación
Contacto: Dr. Luis Pineda
Aprendizaje implicito en Golme
Lugares: Licenciatura (2)
Descripcion: En este proyecto buscamos definir un mecanismo para que durante la realización de tareas el robot Golem-II+ aprenda cierto conocimiento que pueda ser explotado en la realización de una nueva tarea.
Dirigido a:Carreras en computación y psicología
Requisitos extras:
- Programación básica opcional
Contacto: Dr. Ivan Meza
Reconocimiento de Gestos para la Interacción Humano-Robot
Lugares disponibles: Licenciatura (1), Maestría (1)
Descripcion: Los gestos representan una importante forma de comunicación para los humanos. Para un robot de servicio la habilidad de reconocer e interpretar gestos puede permitir una interacción más natural y efectiva con los humanos. Este proyecto busca desarrollar un sistema de reconocimiento de gestos en tiempo real usando cámaras RGB y/o de profundidad. El sistema se basa en localizar y seguir uniones características en el cuerpo de los usuarios y reconocer diferentes gestos a partir de ellas./p>
Dirigido a: Carreras en computación, electrónica, mecatrónica o afines
Requisitos extras:
- Excelentes habilidades en programación
- Experiencia deseable en visión por computadora o procesamiento de imágenes
Contacto: Dr. Gibran Fuentes
Reconocimiento de Expresiones Faciales

Lugares disponibles: Licenciatura (1), Maestría (1)
Descripcion: El conocimiento del estado emocional de las personas es una información valiosa tanto para la interacción humano-robot como para el aprendizaje y la toma decisiones. En este proyecto se plantea el desarrollo de un sistema de reconocimiento de expresiones faciales a partir de cámaras RGB.
Dirigido a: Carreras en computación, electrónica, mecatrónica o afines
Requisitos extras:
- Excelentes habilidades en programación
- Experiencia deseable en visión por computadora o procesamiento de imágenes
Contacto: Dr. Gibran Fuentes
Reconocimiento de Actividad Humana

Lugares disponibles: Licenciatura (2), Maestría (2), Doctorado(1)
Descripcion: En este proyecto se busca desarrollar un sistema para reconocer por medio de visión acciones comunes que realizan los usuarios cotidianamente tales como caer, leer o dormir. Esta habilidad sería de gran utilidad ya que el robot podría identificar situaciones de emergencia, sin mencionar los beneficios a la interacción humano-robot y la toma de decisiones.
Dirigido a: Carreras en computación, electrónica, mecatrónica o afines
Requisitos extras:
- Excelentes habilidades en programación
- Experiencia deseable en visión por computadora o procesamiento de imágenes
Contacto: Dr. Gibran Fuentes
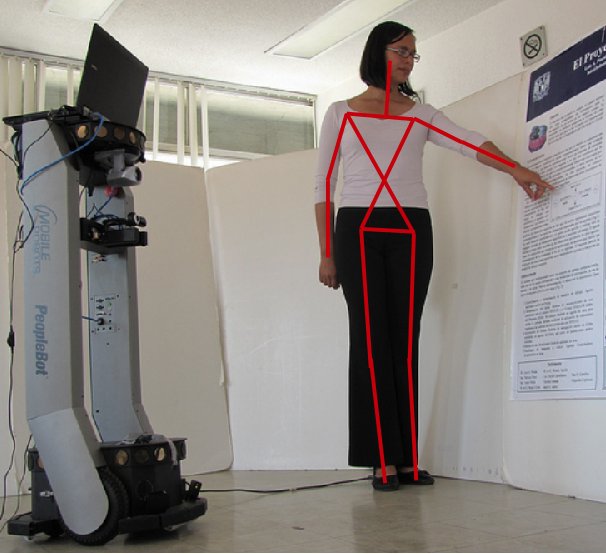
Estimación de Pose de Personas

Lugares disponibles: Licenciatura (1), Maestría (1)
Descripcion: Para que el robot de servicio pueda interactuar de forma natural con los usuarios, no es suficiente detectarlos, seguirlos e identificarlos sino además se requiere estimar su posición y orientación con respecto al robot. Dada la posición del usuario en la imagen, el proyecto consiste en estimar su posición y orientación tridimensional.
Dirigido a: Carreras en computación, electrónica, mecatrónica o afines
Requisitos extras:
- Excelentes habilidades en programación
- Experiencia deseable en visión por computadora o procesamiento de imágenes
Contacto: Dr. Gibran Fuentes
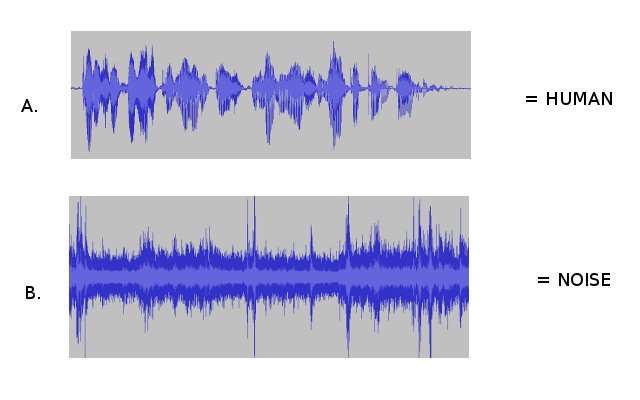
Discriminación entre Fuentes Acústicas Humanas y Entorno
Lugares: Licenciatura (1), Doctorado (1)
Descripción: Descripción: Una importante habilidad que se requiere en un robot de servicio es poder distinguir si una fuente de sonido es humana o es algo que se pueda ignorar. Así, el reconocedor de voz puede tener confianza en estar procesando sólo voz humana. Este proyecto pretende atacar dicho problema, primero, en discriminar entre usuarios conocidos y sonidos del entorno, dado una señal grabado; y, segundo, discriminar, en tiempo real, entre humanos (conocidos y desconocidos) hablando entre si y ruidos en el ambiente.
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
Detección Inteligente de Actividad Sónica en el Entorno
Lugares: Licenciatura (1), Maestria (1)
Descripción: Un importante paso en la secuencia de procesamiento de señales acústicas es detectar cuáles momentos se debe estar procesando la señal de entrada. De esta manera, los pasos subsecuentes sólo procesarían los momentos relevantes de la señal. Ya que el robot de servicio es móvil, y puede cambiar de escenario drásticamente, dicha detección se debe auto-ajustar al ruido ambiental.
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
Caracterización Acústica Inteligente del Entorno y su Filtro
Lugares: Maestria (1), Doctorado (1)
Descripción: Gran parte del contenido acústico de las señales auditivas son nocivas para los pasos subsecuentes de procesamiento auditivo: reverberación, ruidos no-estacionarios, etc. En este proyecto se pretende primero caracterizar acústicamente el entorno, creando una escena auditiva, para después remover los efectos nocivos al procesamiento (por ejemplo, reverberación) y/o obtener información del entorno que sea relevante a otros módulos robóticos (por ejemplo, tamaño del cuarto).
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
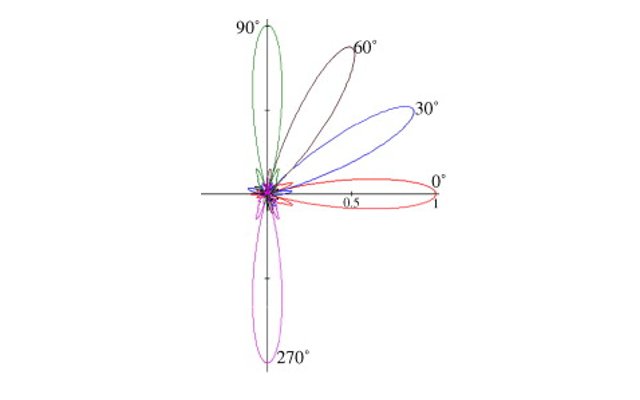
Direccional de Fuentes en Tiempo Real en un Robot de Servicio
Lugares: Maestría(1), Doctorado (1)
Descripción: Un importante habilidad necesaria en un robot de servicio es poder extraer los datos auditivos de fuentes relevantes a la tarea de una grabación ambiental, llevándolo a cabo con un equipo de sonido liviano. Para esto, en el proyecto se pretende direccionalizar, como un tipo radar, la atención auditiva del robot hacia un área del ambiente con muestreos omnidireccionales.
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
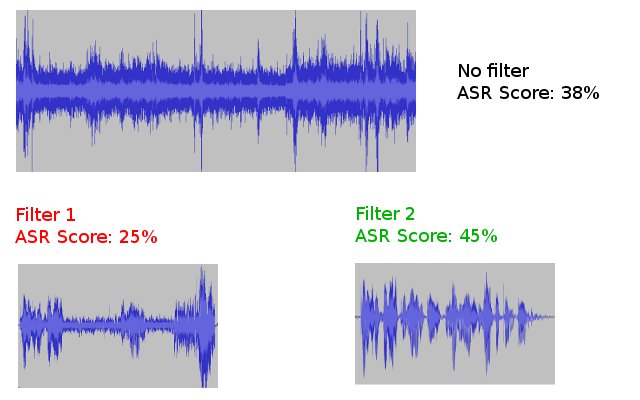
Evaluación de Filtros de Audio para el Beneficio del Reconocimiento de Voz
Lugares: Maestría (1), Doctorado (1)
Descripción: Descripción: Hay una gran cantidad de literatura que cubre diferentes formas de filtrar ruido de señales sonoras, pero es raro ver su evaluación desde el punto de vista del reconocimiento de voz. Es posible que dicho filtros terminen perjudicando la calidad de la voz humana en la señal y, si este fuera el caso, es de interés encontrar cuáles filtros, y su respectiva calibración, son más beneficiosos para el reconocimiento de voz. Asímismo, es también de interés desarrollar filtros con esta finalidad.
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
Identificación de Usuario por Medios Auditivos
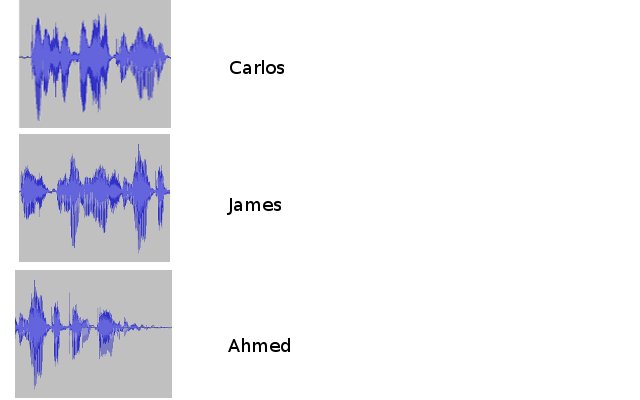
Lugares: Licenciatura (1), Maestría (1), Doctorado (1)
Descripción: Además de poder localizar un usuario en el ambiente por medio del audio, también es de interés poder identificar a dicho usuario como una forma de redundancia para otros módulos de identificación en el robot. En este proyecto se pretende crear un sistema de reconocimiento de usuarios, dado que las características acústicas del usuario sean conocidas a priori; se desarrollará un sistema de entrenar en línea, y automático, en el caso de que el usuario no sea conocido; y se crearán algoritmos de obtención de características acústicas sin necesidad de frases pre-especificadas.
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
Modelación de Error Odométrico en una Plataforma Robótica Móvil
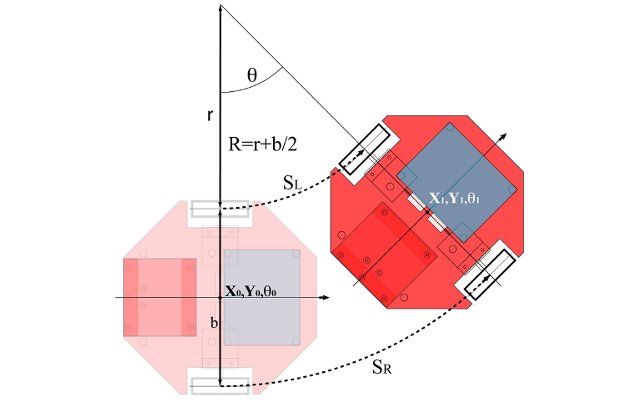
Lugares: Licenciatura (1), Maestría (1)
Descripción: Descripción: Obtener el modelo del error aditivo en la odometría de una plataforma robótica móvil de dos llantas, por medio de herramientas estadísticas. Después, emplear dicho modelo en el sistema de navegación actual del robot. También, desarrollar un sistema de modelación de dicho error que se pueda utilizar en otros tipos de plataformas robóticas.
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
Creación de y Auto-Localización con Mapas de Información Multimodal
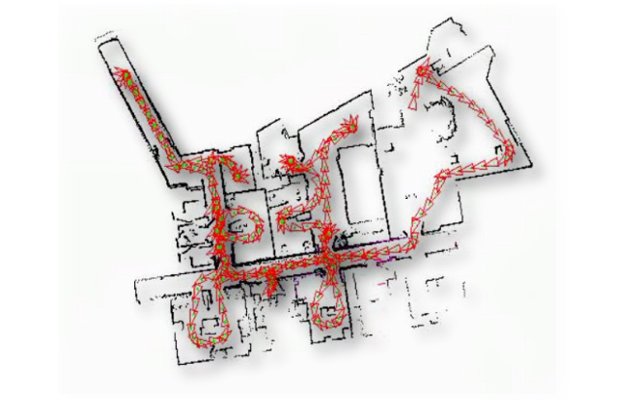
Lugares: Doctorado (1)
Descripción: Actualmente, laser es el tipo de información más utilizado en la creación automática de mapas para ser empleado en la navegación robótica. Con la introducción de cámaras RGBd, hay grandes oportunidades de proveer más información al crear dichos mapas, obteniendo redundancia y una mejor base para extrapolación.
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
Evasión Contextual de Obstáculos
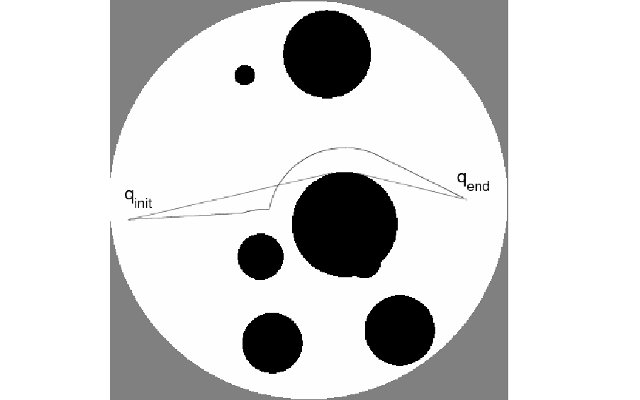
Lugares: Maestría (1), Doctorado (1)
Descripción: Una parte esencial de la navegación robótica es la evasión de obstáculos, que usualmente se lleva a cabo de una manera reactiva: se aplican ciertos pasos, independientemente de lo que haya sucedido momentos antes, con los que se espera que la evasión emerja. Es de interés que el robot tenga estrategias para evadir obstáculos de tipos ya conocidos (puertas, objetos en el suelo, etc.) y así eficientar la evasión. También, dado el conocimiento del objeto a evadir, es útil que el robot refleje dicho objeto en el mapa conocido del ambiente y actualizar la navegación posterior.
Dirigido a: Carreas en computación y similares
Requisitos extras:
- Habilidad extensiva en programación
- Conocimientos en Inteligencia Artificial y Procesamiento de Señales
- Experiencia deseable en manejo de equipo de sonido
Contacto:Dr. Caleb Rascón
Odometría Visual para Robots de Servicio

Lugares: Licenciatura (1), Maestría (1)
Descripción: Comúnmente la posición del robot en el tiempo se estima registrando sus movimientos por medio de sensores. En robots de ruedas, el movimiento usualmente se mide con codificadores rotatorios. Sin embargo, debido al ruido inherente al sensor así como las condiciones de la superficie, el error crece con el tiempo. La odometría visual nos permite estimar el movimiento usando cámaras RGB y/o de profundidad. Esta información puede complementar a los codificadores rotatorios ya que no es sensible a las características de la superficie. El objetivo del proyecto es desarrollar un sistema que combine codificadores rotatorios y odometría visual.
Dirigido a: Carreras en mecatrónica, electrónica, computación o similares
Requisitos extras:
- Excelentes habilidades en programación
- Experiencia deseable en navegación y/o visión por computadora
Contacto: Dr. Caleb Rascón y Dr. Gibran Fuentes
Análisis del habla infantil
Lugares: Licenciatura (2)
Descripcion: El Grupo Golem cuenta con una colección extensiva del habla de niños interactuando con el sistema adivina la carta localizado en el museo Universum. Hemos trabajado en la caracterización de dicho corpus desdel el punto de vista del reconocimeinto de voz. En este proyecto se enfocaría a caracterizar el corpus desdel el punto de vista de los fenómenos fonéticos propios del habla infantil.
Dirigido a:Carreras en lingüística
Requisitos extras:
- Haber tomado curso de fonética
Contacto: Dr. Luis Pineda y Dr. Ivan Meza
Recolección de corpus en ambiente ruidoso
Lugares: Licenciatura (2)
Descripcion: El Grupo Golem realiza investigación para mejorar el desempeño de las tecnologías del habla para su uso en robots de servicio. Uno de los problemas más sobresalientes es el reconocimiento de voz en lugares con mucho ruido. Por lo siguiente el grupo busca recolectar un corpus del español de méxico ambientes ruidosos que permitan realizar investigación en este campo.
Dirigido a:Carreras en lingüística
Requisitos extras:
- Curso de fonética (opcional)
Contacto:Dr. Ivan Meza
Identificación de hablante
Lugares: Licenciatura (1), Maestría (2)
Descripcion: La identificación de un usuario a través del uso de la voz tiene multiple aplicaciones en las tecnologías del habla. En particular, estamos interesados en aplicar nuestros avances al robot Golem de tal forma que en el futuro Golem pueda reconocer a sus usuarios a través del habla.
Dirigido a:Carreras en computación y lingüística
Requisitos extras:
- Conceptos de programación o deseo de incursionar
- Curso de fonética (opcional)
Contacto:Dr. Ivan Meza
Chatbot con personalidad
Lugares: Licenciatura (1), Maestría (2)
Descripcion: En este proyecto nos exploramos la creación de chatbot para mantener una conversación ligera con un usuario donde elementos de personalidad del chatbot sean destacables para el usuario. Por ejemplo, su edad, nivel de educación o género. Posibles aplicaciones del desarrollo son construir aplicaciones conversacionales con el Robot Golem o su uso en temas forenses.
Dirigido a:Carreras en computación y lingüística
Requisitos extras:
- Conceptos de programación
Contacto:Dr. Ivan Meza

Lugares: Licenciatura (1)
Descripcion: Cada vez que Golem habla tiene que decir el mensajes que va a comunicar al usuario. Actualemnte Golem hace esto usando mensajes predeterminados. En este proyecto se buscará alternativas a esta opción con el objetivo de hacer la respuestas de Golem más diversas e independiente de la tarea.
Dirigido a:Carreras en computación o lingüística
Requisitos extras:
- Programación básica opcional
Contacto: Dr. Luis Pineda y Dr. Ivan Meza
Lugares: Licenciatura (1)
Descripcion: Cada vez que Golem habla tiene que decir el mensajes que va a comunicar al usuario. Actualemnte Golem hace esto usando mensajes predeterminados. En este proyecto se buscará alternativas a esta opción con el objetivo de hacer la respuestas de Golem más diversas e independiente de la tarea.
Dirigido a:Carreras en computación o lingüística
Requisitos extras:
- Programación básica opcional
Contacto: Dr. Luis Pineda y Dr. Ivan Meza
Etiquetación de emociones en interacciones infantiles

Lugares: Licenciatura (2)
Descripcion: La identificación de las emociones del usuario es una parte importante durante una inteacción. Este proyecto busca la creación de un recurso compuesto por videos y audio de niños interactuando con un sistema donde se identifiquen las emociones expresadas por los niños.
Dirigido a:Carreras en computación, lingüística y psicología
Requisitos extras:
- Programación básica opcional
Contacto: Dr. Luis Pineda y Dr. Ivan Meza
Razonamiento diagrámatico
Lugares: Licenciatura (1), Maestría (1), Doctorado (1)
Descripcion: La interpretación de diagramas en nuestra vida cotidiana nos permité interactuar con el mundo y resolver problemas de manera eficiente, por ejemplo, como seguir instrucciones de ensamblar un mobiliario, como acomodar objetos sobre una mesa, encontrar rutas alternas, y describir escenas. En este proyecto se busca dotar al robot Golem con capacidades de razonamiento diagrámatico para la realización de tareas como navegación, manipulación de objetos y generación del lenguaje.
Recursos adicionales
- Descubrimiento y Prueba de Teoremas Diagramáticos: El Caso del Teorema de Pitagoras (2005)
- Abstraction, Visualization and Graphical Proof (2001)
Dirigido a:Carreras en computación
Requisitos extras:
- Programación básica opcional
Contacto: Dr. Luis Pineda y Dr. Ivan Meza