







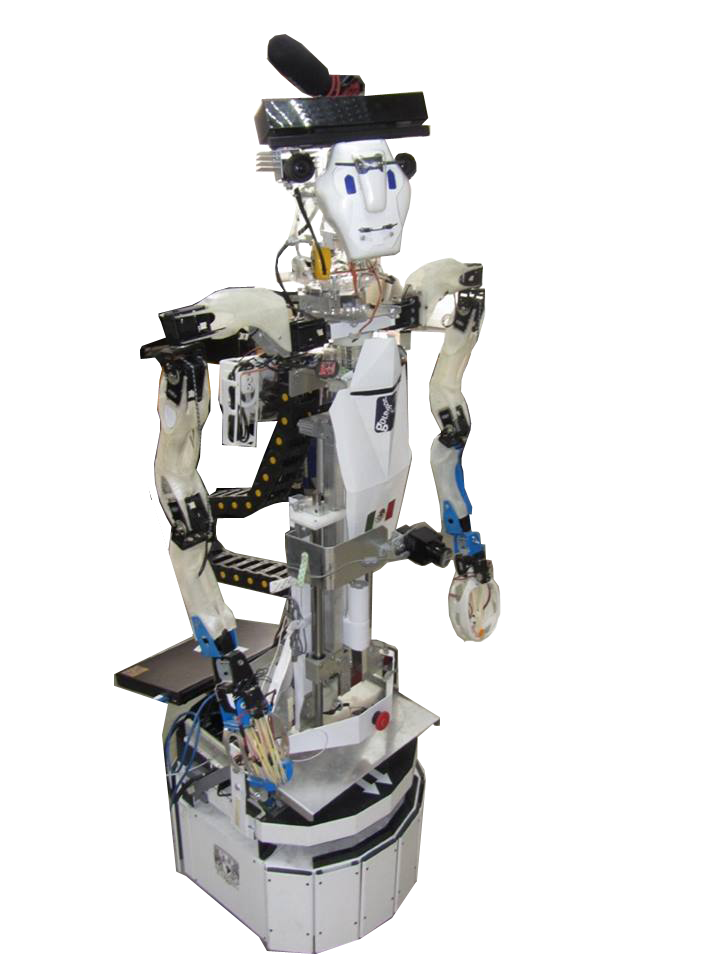
Golem-III
El diseño de nuestro robot se basa en un marco teórico conceptual centrado en la noción de modelos de diálogo dentro de la arquitectura orientada a la interacción cognitiva (IOCA) y en el ambiente de programación asociado, SitLog. Dicho marco provee flexibilidad y abstracción para la descripción e implementación de tareas, así como para la modularidad a alto nivel. Las tareas de la competencia RoboCup@Home son implementadas bajo este marco utilizando una biblioteca de conductas básicas. Además, sobre este marco, un sistema que realiza el diagnóstico, la toma de decisión y la planeación ha sido desarrollado como una plataforma de máquina de inferencia con la cual la detección de errores y la recuperación son posibles.
Para apreciar algunos videos dé click aquí, y para ver fotos aquí.
Golem-III es un robot construido dentro del grupo con el siguiente hardware:
- Un arreglo de sonares con 8 sensores
- Base PatrolBot
- Dos arreglos protectores cada uno con 5 sensores al tacto
- Bocinas bidireccionales Infinity de 3.5 pulgadas
- Computadora Cobra EBX-12
- Láser Sick LMS-500
Asimismo, hemos añadido el siguiente harware:
- Dos computadoras laptop Dell Precision M7510
- Láser localizador Hokuyo SOKUIKI
- Switch ethernet Black Box alimentado por USB con 5 puertos
- Camera Microsoft Kinect 2
- Cámara de alta resolución Point Grey Flea USB 3
- Interfaz de audio 8SoundsUSB
- 3 micrófonos miniatura
- Micrófono direccional RODE VideoMic
- Torso, brazos y cuello construídos dentro del grupo